实现原理
天空变换是图像分割的一种应用,把图像中的天空与非天空区分割开,结合掩膜将天空更改为其他图像。如何较优地实现天空变换,与识别证件照类似,难点在于两个:
1.天空分割。将图像转为HSV并对S和V通道进行直方图均衡化,再通过设定的HSV三通道阈值选定天空的颜色范围,进而提取天空区域(H为78-124,S为0-255,V为78-255,该参数为我大量测试后凭经验所设,考虑到图像多样性,函数我提供了参数接口以便动态调整);thresh为天空区域的掩膜图,反相后的thresh_为非天空区域掩膜图,接下来识别非天空区的轮廓区域,采用外部轮廓方式,这样能提取出多个轮廓区,保留最大的轮廓区,不出意外这个就是前景区(出意外就自己重写该部分代码来判断真实的前景区);然后闭运算填充轮廓区内部微小孔洞,注意这个参数越大,轮廓越完整,但代价是一些孔洞处没法进行图像更换,所以自己把握参数;进行均值滤波,这一步是为了边缘平滑,为后续新天空和非天空区的融合作铺垫;输出Foreground,该掩膜图255的区域为非天空区。
2.两区域边缘融合。如果不能很好地融合,就能看出明显的抠图痕迹,所以融合是很关键的一步。首先,将新天空图尺寸调整为原图尺寸;其次,对蒙版区(掩膜)进行均值滤波,其边缘区会生成介于0-255之间的缓存区;再通过比例分配的方式对缓存区的像素点上色,我固定的比例为前景0.3天空0.7,可以使得缓存区颜色倾向于天空色,且实现较好地过渡;最后,蒙版为0的区域为新天空图,蒙版为255的区域不变。
至此,完成了天空变换。C++实现代码如下。
功能函数代码
// 天空分离 cv::Mat SkySeparation(cv::Mat src, Inputparama input) { // 异常数值修正 input.low_h = max(uchar(0), min(uchar(255), input.low_h)); input.high_h = max(uchar(0), min(uchar(255), input.high_h)); input.low_s = max(uchar(0), min(uchar(255), input.low_s)); input.high_s = max(uchar(0), min(uchar(255), input.high_s)); input.low_v = max(uchar(0), min(uchar(255), input.low_v)); input.high_v = max(uchar(0), min(uchar(255), input.high_v)); input.close_size= max(0, min(10, input.close_size)); input.blur_size = max(0, min(10, input.blur_size)); // 转为hsv通道 cv::Mat hsv,nhsv,thresh; cvtColor(src, hsv, COLOR_BGR2HSV); vector<cv::Mat> hsvs; split(hsv, hsvs); cv::Mat h,s,v; // 直方图均衡化 equalizeHist(hsvs[1], s); equalizeHist(hsvs[2], v); hsvs[1] = s.clone(); hsvs[2] = v.clone(); merge(hsvs, nhsv); // 按天空色选出mask并反相 cv::Mat low=(cv::Mat_<uchar>{ input.low_h, input.low_s, input.low_v }); cv::Mat high = (cv::Mat_<uchar>{ input.high_h, input.high_s, input.high_v }); inRange(nhsv, low, high, thresh); cv::Mat thresh_ = 255 - thresh; // 寻找轮廓,找出最大轮廓作为前景图 vector<vector<Point>> contour;// , ncontour; vector<Vec4i> hierarchy; findContours(thresh_, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE); cv::Mat Foreground=thresh_.clone(); if (!contour.empty() && !hierarchy.empty()) { int max = 0; std::vector<std::vector<cv::Point> >::const_iterator itc = contour.begin(); std::vector<std::vector<cv::Point> >::const_iterator itmax; // 遍历所有轮廓 int i = 1; while (itc != contour.end()) { double area = cv::contourArea(*itc); if (area > max) { itmax = itc; max = area; } itc++; } for (auto it = contour.begin(); it != contour.end(); it++) { if (it!=itmax) { cv::Rect rect = cv::boundingRect(cv::Mat(*it)); for (int i = rect.y; i < rect.y + rect.height; i++) { uchar *output_data = Foreground.ptr<uchar>(i); for (int j = rect.x; j < rect.x + rect.width; j++) { // 将连通区的值置0 if (output_data[j] == 255) { output_data[j] = 0; } } } } } } // 闭运算 cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(2*input.close_size+1, 2 * input.close_size + 1)); cv::morphologyEx(Foreground, Foreground, MORPH_CLOSE, element); // 滤波 cv::blur(Foreground, Foreground, Size(2 * input.blur_size + 1, 2 * input.blur_size + 1)); return Foreground; }
C++测试代码
#include <iostream> #include <opencv2/opencv.hpp> #include <time.h> using namespace std; using namespace cv; // 输入参数 struct Inputparama { uchar low_h = 78; // 识别天空区域hsv颜色的最底H值 uchar high_h = 124; // 识别天空区域hsv颜色的最高H值 uchar low_s = 0; // 识别天空区域hsv颜色的最底S值 uchar high_s = 255; // 识别天空区域hsv颜色的最高S值 uchar low_v = 78; // 识别天空区域hsv颜色的最底V值 uchar high_v = 255; // 识别天空区域hsv颜色的最高V值 int close_size = 4; // 非天空区域闭运算尺寸,该值越大则区域越完整,代价是一些孔洞处没法进行图像更换 int blur_size = 2; // 非天空区域滤波窗口尺寸,该值越大则天空与非天空区衔接处越模糊,适当的数值可以带来较优的融合效果 }; cv::Mat SkySeparation(cv::Mat src, Inputparama input); cv::Mat ImageFusion(cv::Mat src1, cv::Mat src2, cv::Mat mask); int main() { cv::Mat src = imread("test3.jpg"); cv::Mat sky = imread("sky5.jpg"); Inputparama input; input.low_h = 78; input.high_h = 124; input.low_s = 0; input.high_s = 255; input.low_v = 78; input.high_v = 255; input.close_size = 4; input.blur_size = 2; clock_t s, e; s = clock(); cv::Mat thresh = SkySeparation(src,input); cv::Mat result = ImageFusion(src, sky, thresh); e = clock(); double dif = (e - s) / CLOCKS_PER_SEC; cout << "time:" << dif << endl; imshow("original", src); imshow("result", result); waitKey(0); return 0; } // 天空分离 cv::Mat SkySeparation(cv::Mat src, Inputparama input) { // 异常数值修正 input.low_h = max(uchar(0), min(uchar(255), input.low_h)); input.high_h = max(uchar(0), min(uchar(255), input.high_h)); input.low_s = max(uchar(0), min(uchar(255), input.low_s)); input.high_s = max(uchar(0), min(uchar(255), input.high_s)); input.low_v = max(uchar(0), min(uchar(255), input.low_v)); input.high_v = max(uchar(0), min(uchar(255), input.high_v)); input.close_size= max(0, min(10, input.close_size)); input.blur_size = max(0, min(10, input.blur_size)); // 转为hsv通道 cv::Mat hsv,nhsv,thresh; cvtColor(src, hsv, COLOR_BGR2HSV); vector<cv::Mat> hsvs; split(hsv, hsvs); cv::Mat h,s,v; // 直方图均衡化 equalizeHist(hsvs[1], s); equalizeHist(hsvs[2], v); hsvs[1] = s.clone(); hsvs[2] = v.clone(); merge(hsvs, nhsv); // 按天空色选出mask并反相 cv::Mat low=(cv::Mat_<uchar>{ input.low_h, input.low_s, input.low_v }); cv::Mat high = (cv::Mat_<uchar>{ input.high_h, input.high_s, input.high_v }); inRange(nhsv, low, high, thresh); cv::Mat thresh_ = 255 - thresh; // 寻找轮廓,找出最大轮廓作为前景图 vector<vector<Point>> contour;// , ncontour; vector<Vec4i> hierarchy; findContours(thresh_, contour, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE); cv::Mat Foreground=thresh_.clone(); if (!contour.empty() && !hierarchy.empty()) { int max = 0; std::vector<std::vector<cv::Point> >::const_iterator itc = contour.begin(); std::vector<std::vector<cv::Point> >::const_iterator itmax; // 遍历所有轮廓 int i = 1; while (itc != contour.end()) { double area = cv::contourArea(*itc); if (area > max) { itmax = itc; max = area; } itc++; } for (auto it = contour.begin(); it != contour.end(); it++) { if (it!=itmax) { cv::Rect rect = cv::boundingRect(cv::Mat(*it)); for (int i = rect.y; i < rect.y + rect.height; i++) { uchar *output_data = Foreground.ptr<uchar>(i); for (int j = rect.x; j < rect.x + rect.width; j++) { // 将连通区的值置0 if (output_data[j] == 255) { output_data[j] = 0; } } } } } } // 闭运算 cv::Mat element = getStructuringElement(MORPH_ELLIPSE, Size(2*input.close_size+1, 2 * input.close_size + 1)); cv::morphologyEx(Foreground, Foreground, MORPH_CLOSE, element); // 滤波 cv::blur(Foreground, Foreground, Size(2 * input.blur_size + 1, 2 * input.blur_size + 1)); return Foreground; } // 前景背景融合 cv::Mat ImageFusion(cv::Mat src1, cv::Mat src2, cv::Mat mask) { cv::Mat sky; resize(src2, sky, Size(src1.cols, src1.rows)); cv::Mat result = src1.clone(); int row = src1.rows; int col = src1.cols; // 改色 for (int i = 0; i < row; ++i) { uchar *s1 = result.ptr<uchar>(i); uchar *s2 = sky.ptr<uchar>(i); uchar *m = mask.ptr<uchar>(i); for (int j = 0; j < col; ++j) { // 蒙版为0的区域就是标准背景区 if (m[j] == 0) { s1[3 * j] = s2[3 * j]; s1[3 * j + 1] = s2[3 * j + 1]; s1[3 * j + 2] = s2[3 * j + 2]; } // 不为0且不为255的区域是轮廓区域(边缘区),需要虚化处理 else if (m[j] != 255) { // 边缘处按比例上色 int newb = (s1[3 * j] * m[j] * 0.3 + s2[3 * j] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3); int newg = (s1[3 * j + 1] * m[j] * 0.3 + s2[3 * j + 1] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3); int newr = (s1[3 * j + 2] * m[j] * 0.3 + s2[3 * j + 2] * (255 - m[j])*0.7) / ((255 - m[j])*0.7 + m[j] * 0.3); newb = max(0, min(255, newb)); newg = max(0, min(255, newg)); newr = max(0, min(255, newr)); s1[3 * j] = newb; s1[3 * j + 1] = newg; s1[3 * j + 2] = newr; } } } return result; }
测试效果
 图1 对比图1
图1 对比图1
 图2 对比图2
图2 对比图2

图3 对比图3
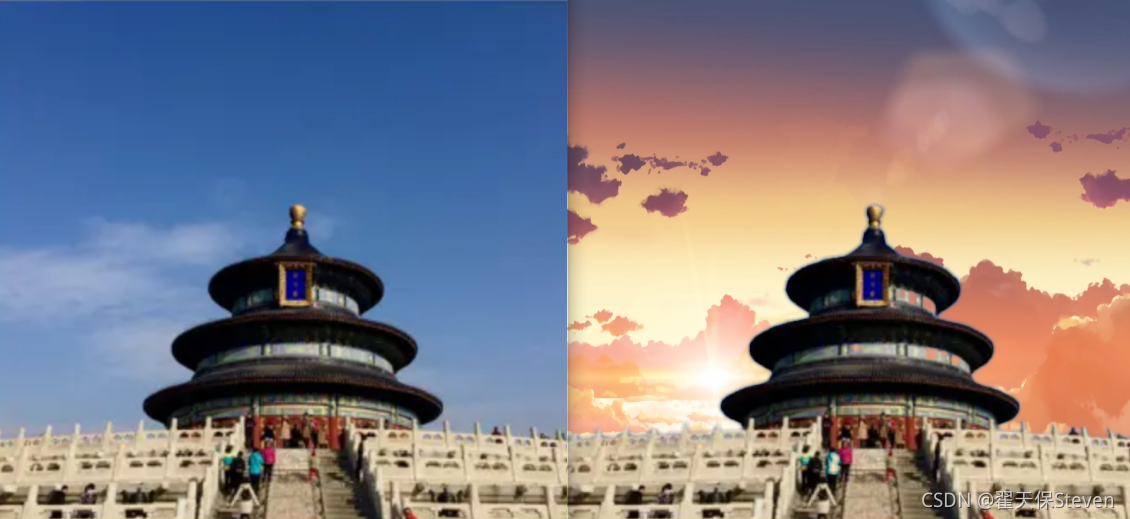 图4 对比图4
图4 对比图4
如源码所示,函数输入参数共有5项,其说明如下:
- 前6个参数分别为hsv三通道的最大最小值。
- close_size为闭运算尺寸,如果处理的图像中有小树林,建议尺寸调小,不然小树林间的缝隙就是原图,有点不协调。
- blur_size为滤波窗口尺寸,平滑天空与非天空区衔接处。
总的来说,图像如果有明显天空背景,基本都能成功;天空白色区域过多可能识别不准,因为白色的hsv值和蓝色差太多;天空下面有大片海水,也不太行,就识别出来不符合现实逻辑。
源码只有100多行,看懂原理最重要,比直接调用api更能学到知识。永远记住,“代码是死的,场景是多变的,而人是活的。”,针对不同场景,合理改写代码,才能产出最适合你的代码。
如果函数有什么可以改进完善的地方,非常欢迎大家指出,一同进步何乐而不为呢~
如果文章帮助到你了,可以点个赞让我知道,我会很快乐~加油!
